
農(nóng)機VR虛擬現(xiàn)實培訓(xùn)系統(tǒng)是一種結(jié)合虛擬現(xiàn)實技術(shù)的農(nóng)機培訓(xùn)方式。該系統(tǒng)基于拖拉機、收割機駕駛培訓(xùn)大綱和駕駛模擬機行業(yè)標(biāo)準(zhǔn)開發(fā),采用真拖拉機、收割機的操作原理,配合相應(yīng)的VR操作硬件和軟件,為學(xué)員提供身臨其境的模擬操作體驗。
農(nóng)機VR虛擬現(xiàn)實培訓(xùn)系統(tǒng)具有以下特點和優(yōu)勢:
①身臨其境的感受:系統(tǒng)提供逼真的農(nóng)機操作環(huán)境,農(nóng)田、農(nóng)機,使學(xué)員仿佛置身于真實的農(nóng)機操作現(xiàn)場,交互性強,從而增強學(xué)習(xí)效果。
②操作靈活:無論是白晝還是陰雨天,系統(tǒng)均可進(jìn)行培訓(xùn),且培訓(xùn)時間可根據(jù)學(xué)校情況靈活調(diào)整,不受氣候和場地限制,操作靈活。
③提高教學(xué)質(zhì)量:系統(tǒng)可以配合聲音、圖像、三維動畫及互動視景設(shè)備,培養(yǎng)學(xué)員認(rèn)識農(nóng)機,了解農(nóng)機的工作原理,了解農(nóng)機的內(nèi)部架構(gòu),拖拉機、收割機操作前熟練掌握農(nóng)機的各種操作技能及技巧,操作辦法,操作原理,農(nóng)機拆卸等,達(dá)到熟能生巧的目的,提高培訓(xùn)效率。
④節(jié)省成本:相比傳統(tǒng)的農(nóng)機培訓(xùn)方式,VR虛擬現(xiàn)實培訓(xùn)系統(tǒng)的培訓(xùn)成本較低,損耗較低,重復(fù)使用性強,為學(xué)校節(jié)省龐大的教學(xué)開支。
⑤安全性高:學(xué)員進(jìn)行模擬操作時不會對機器、自身或?qū)W校財產(chǎn)帶來意外和風(fēng)險,從而提高了培訓(xùn)的安全性。
農(nóng)機VR虛擬現(xiàn)實培訓(xùn)系統(tǒng)是一種具有多重優(yōu)勢的農(nóng)機培訓(xùn)方式,能夠提高培訓(xùn)效果、節(jié)省成本并增強安全性。這種培訓(xùn)方式在農(nóng)機駕駛培訓(xùn)學(xué)校中具有廣闊的應(yīng)用前景。
接下來讓我們認(rèn)識一下“農(nóng)機VR虛擬現(xiàn)實培訓(xùn)系統(tǒng)”:
(一)系統(tǒng)介紹:
該系統(tǒng)分為“拖拉機VR實訓(xùn)”和“收割機VR實訓(xùn)”兩個模塊,每個模塊下分三個小模塊:“設(shè)備拆裝”、“原理模擬”、“模擬場景”,均采用第一人稱視角認(rèn)知為主,在特定地點觸發(fā)特定過程展示為輔的展示方法;
(二)運行環(huán)境
CPU: Intel(R)Core(TM)i5-8400@2.80GHz以上;
內(nèi)存: 4G以上;
顯示器: 比例為:16:9;
顯卡: GTX 1060以上
外設(shè): USB接口,鍵盤鼠標(biāo)。
操作系統(tǒng):支持Windows10以上 64位版本。
虛擬設(shè)備: HTC Vive。
(三)內(nèi)容介紹
農(nóng)機VR虛擬現(xiàn)實培訓(xùn)系統(tǒng)主界面,學(xué)員在實訓(xùn)室內(nèi),佩戴VR設(shè)備(頭盔、手柄),便可開啟“農(nóng)機VR虛擬現(xiàn)實培訓(xùn)系統(tǒng)”之旅。
全程使用VR設(shè)備進(jìn)行交互操作。

拖拉機VR實訓(xùn)、收割機VR實訓(xùn)功能介紹(開發(fā)拓展性較強,可根據(jù)客戶需求提供更多功能,歡迎向我司咨詢):
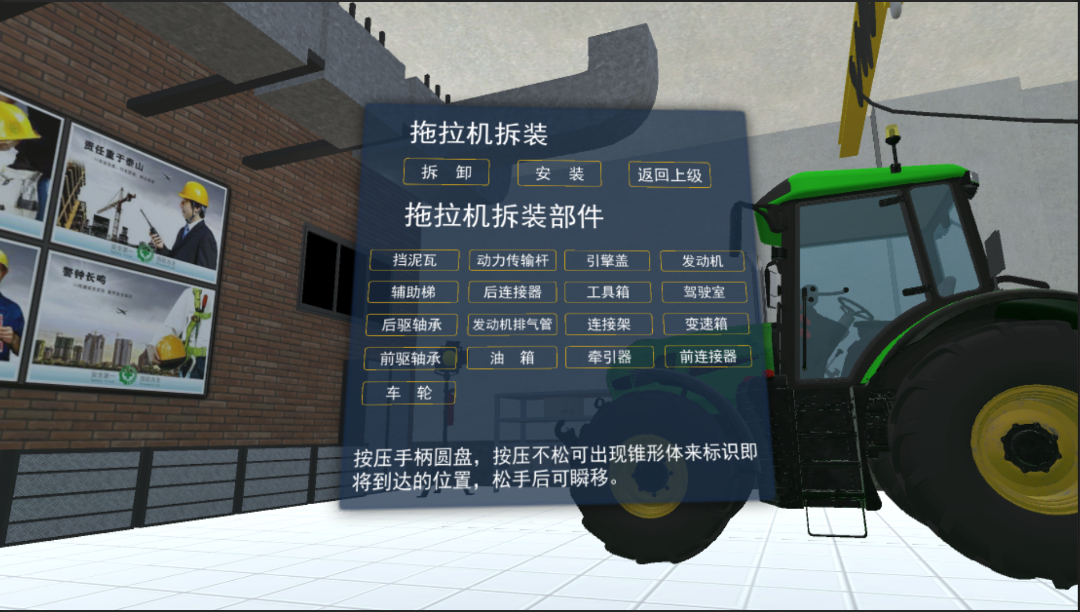
1.設(shè)備拆裝
拖拉機VR設(shè)備拆裝部件包括:擋泥瓦、動力傳輸桿、引擎蓋、發(fā)動機、輔助梯、后連接器、工具箱、駕駛室、后驅(qū)軸承、發(fā)動機排氣管、連接架、變速箱、前驅(qū)軸承、郵箱、牽引器、前連接器及車輪等部件。
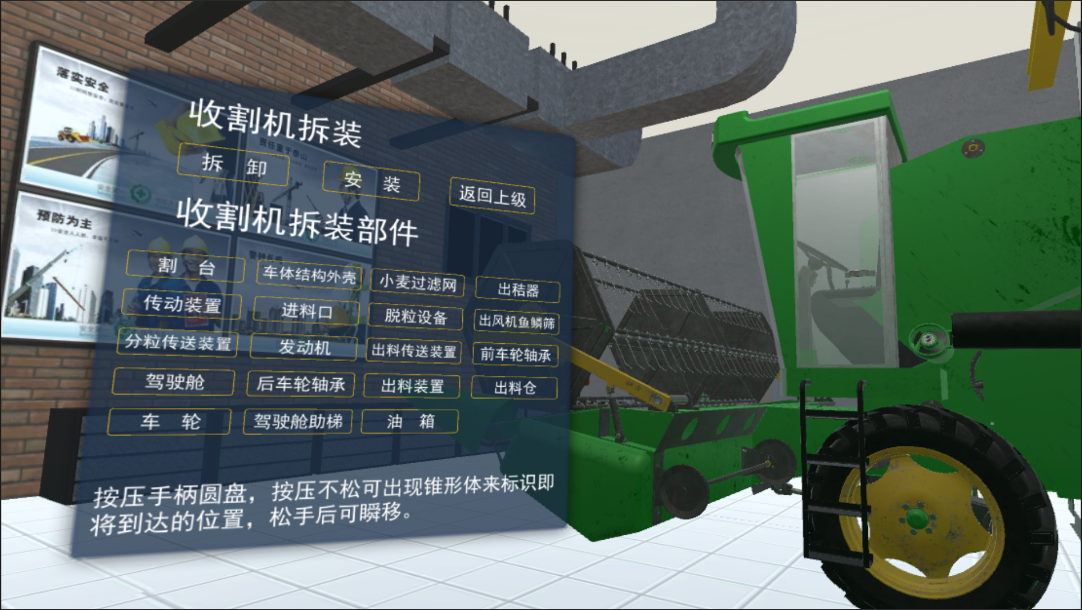
收割機VR設(shè)備拆裝部件包括:割臺、車體結(jié)構(gòu)外殼、小麥過濾網(wǎng)、出秸器、傳動裝置、進(jìn)料口、脫粒設(shè)備、出風(fēng)機魚鱗篩、分粒傳送裝置、發(fā)動機、出料傳送裝置、前車輪軸承、駕駛艙、后車輪軸承、出料裝置、出料倉、車輪、駕駛艙助梯及油箱等部件。
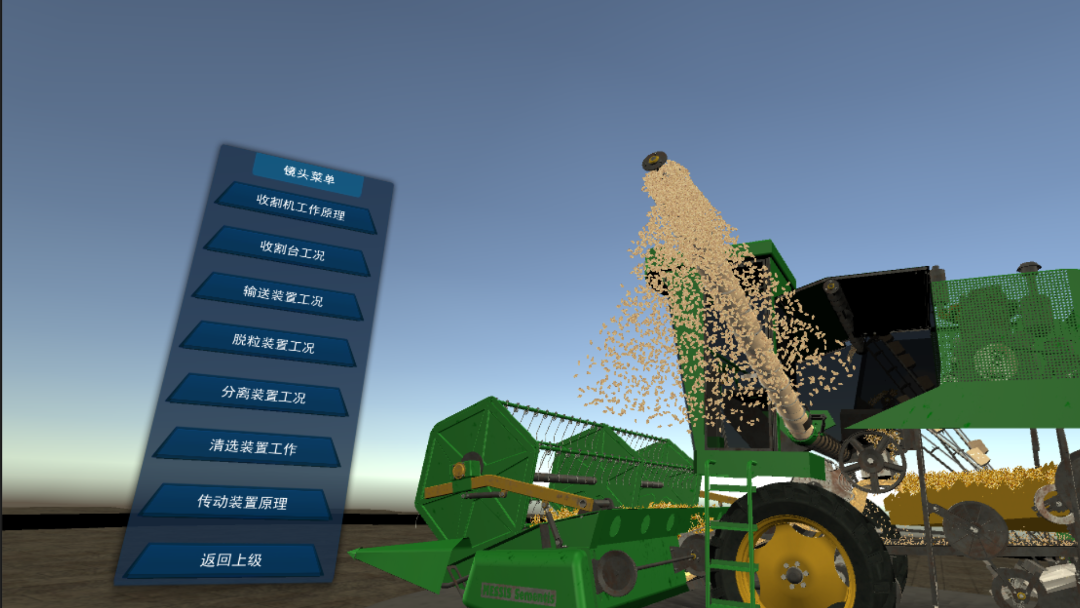
2.原理模擬
拖拉機VR原理模擬包括:拖拉機工作原理、發(fā)動機工況、前橋工作原理、后橋工作原理及變速箱工況等五項內(nèi)容。
收割機VR原理模擬包括:收割機工作原理、收割臺工況、輸送裝置工況、脫粒裝置工況、分離裝置工況、清選裝置工況及傳動裝置原理等七項內(nèi)容。

3.模擬場景
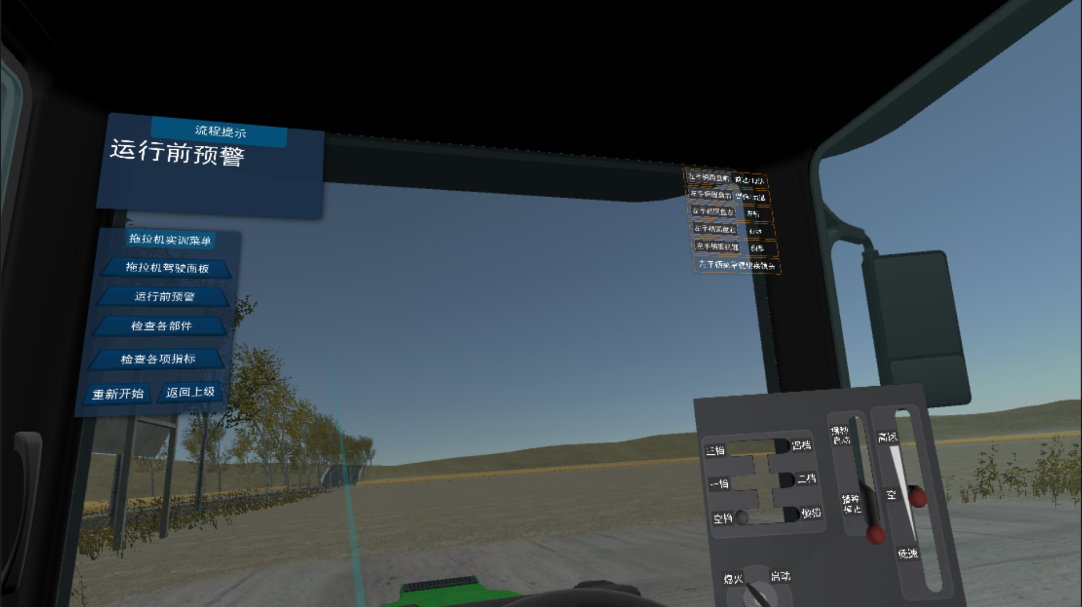
拖拉機VR模擬場景是根據(jù)流程提示步驟,通過手柄射線觸發(fā)按鈕進(jìn)行拖拉機操作流程的學(xué)習(xí)。
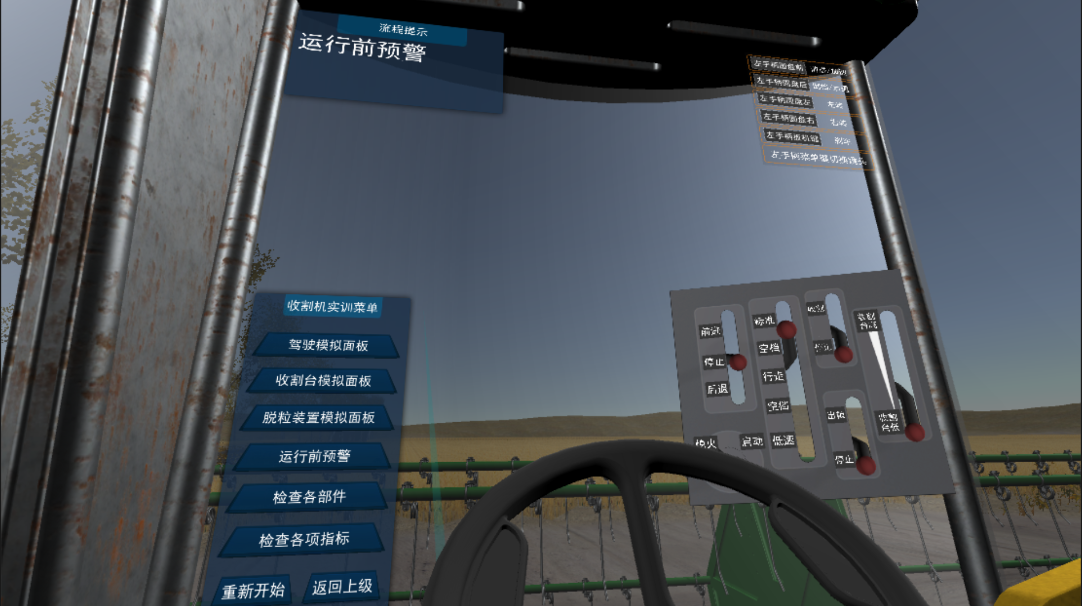
收割機VR模擬場景是根據(jù)流程提示步驟,通過手柄射線觸發(fā)按鈕進(jìn)行收割機操作流程的學(xué)習(xí)。